

 海南锦旭网络有限公司
海南锦旭网络有限公司
其他未分类
公司地址:海南省海口市龙华区金宇街道坡博路8号B栋椰港创业基地201-K53
企业信息
注册资本:100--200万
注册时间: 2023-08-14





智能机器人系统_AI机器人系统简介_海南锦旭网络有限公司
- 产品名:机器人系统
- 产品价格:面议
- 尺寸:
- 产地:
- 公司:
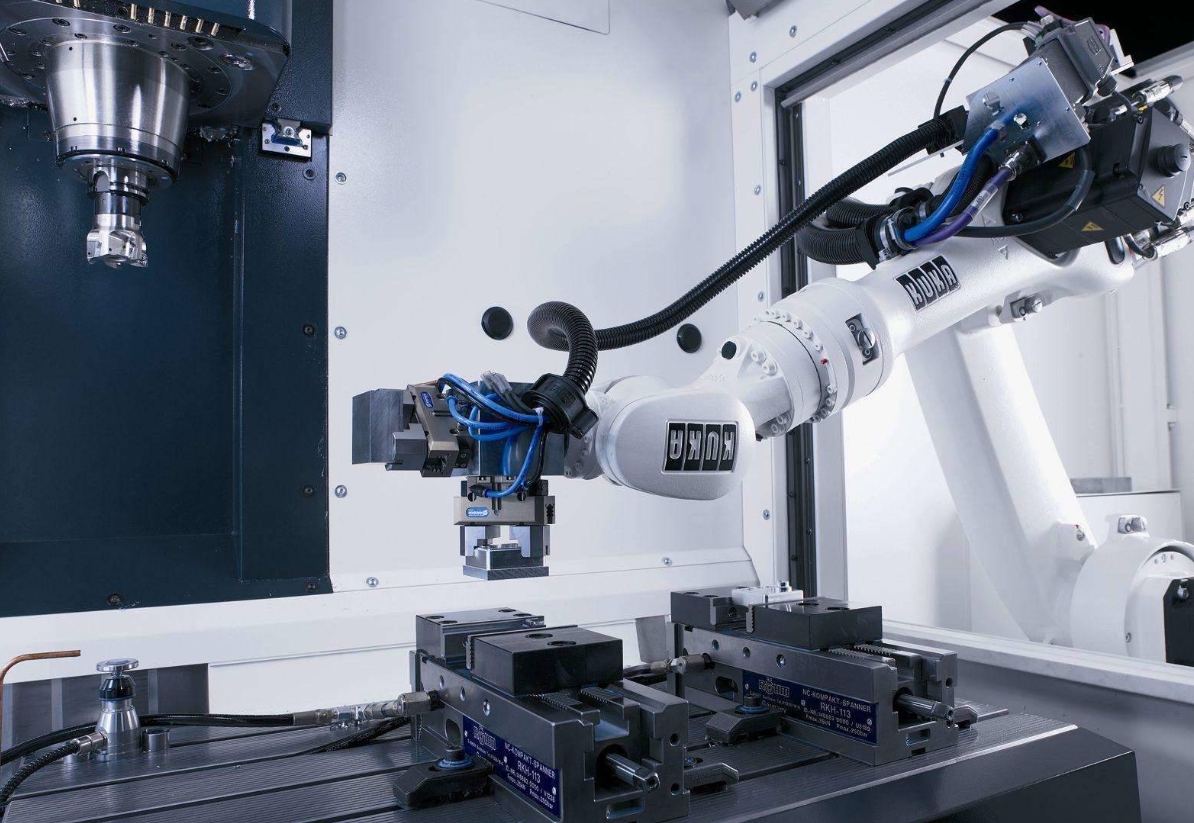
1)非伺服机器人。非伺服机器人工作能力比较有限,它们往往涉及那些叫做“终点”、“抓放”或“开关”式机器人,尤其是“有限顺序”机器人!2)伺服控制机器人!伺服控制机器人比非伺服机器人有更强的工作能力,因而价格较贵,而且在某些情况下不如简单的机器人可靠。伺服控制机器人又可分为点位伺服控制和连续路径(轨迹)伺服控制两种。按机器人控制器的信息输人方式分类在采用这种分类法进行分类时,对于不同国家也略有不同,但它们能够有统一的标准.
但是,空气的可压缩性可使手爪在抓取或卡紧物体时的顺应性提高,防止受力过大而造成被抓物体或手爪本身的破坏.气压系统的压力一般为0.7MPa,因而抓取力小,只有几十牛到几百牛大小!控制系统控制系统的任务是根据机器人的作业指令程序及从传感器反馈回来的信号控制机器人的执行机构,使其完成规定的运动和功能!如果机器人不具备信息反馈特征,则该控制系统称为开环控制系统;如果机器人具备信息反馈特征,则该控制系统称为闭环控制系统!
末端操作器是直接装在手腕上的一个重要部件,它可以是两手指或多手指的手爪,也可以是喷漆枪、焊枪等作业工具!工业机器人机械系统的作用相当于人的身体(如骨髓、手、臂和腿等).驱动系统驱动系统主要是指驱动机械系统动作的驱动装置。根据驱动源的不同,驱动系统可分为电气、液压和气压三种以及把它们结合起来应用的综合系统!该部分的作用相当于人的肌肉!无论电气还是液压驱动的机器人,其手爪的开合都采用气动形式!气压驱动机器人结构简单、动作迅速、价格低廉,但由于空气具有可压缩性,其工作速度的稳定性较差.
智能机器人系统
专业的AI技术_智能AI技术简介_海南锦旭网络有限公司
机器人的分类方法很多.这里首先介绍i种分类法,即按机械手的几何结构、机器人的控制方式以及机器人的信息输入方式!按机械手的几何结构分类机器人机械手的机械配置形式多种多样。常见的结构形式是用其坐标特性来描述的!这些坐标结构包括笛卡儿坐标结构、柱面坐标结构、极坐标结构、球面坐标结构和关节式球面坐标结构等!这里简单介绍柱面、球面和关节式球面坐标结构三种常见的机器人。按机器人的控制方式分类按照控制方式可将机器人分为非伺服机器人和伺服控制机器人两种。
c!自立型机器人!在设计制作之后,机器人无需人的干预,能够在各种环境下自动完成各项拟人任务。机器人系统是由机器人和作业对象及环境共同构成的,其中包括机械系统、驱动系统、控制系统和感知系统四大部分.机械系统工业机器人的机械系统包括机身、臂部、手腕、末端操作器和行走机构等部分,每一部分都有若干自由度,从而构成一个多自由度的机械系统.此外,有的机器人还具备行走机构。若机器人具备行走机构,则构成行走机器人;若机器人不具备行走及腰转机构,则构成单机器人臂!
为了规定技术、开发机器人新的工作能力和比较不同国家和公司的成果,就需要对机器人这一术语有某些共同的理解。世界上对机器人还没有统一的定义,各国有自己的定义!这些定义之间差别较大。这种差别的部分原因是很难区别简单的机器人与其密切相关的运送材料的“刚性自动化”技术装置!美国机器人协会(RIA)把机器人定义为“一种用于移动各种材料、零件、工具或专用装置的,通过可编程序动作来执行种种任务的,并具有编程能力的多功能机械手”!
其他未分类
公司地址:海南省海口市龙华区金宇街道坡博路8号B栋椰港创业基地201-K53
企业信息
注册资本:100--200万
注册时间: 2023-08-14
 粤公网安备44030402000848号
粤公网安备44030402000848号