

 弓创信息科技(成都)有限公司
弓创信息科技(成都)有限公司
软件开发
公司地址:四川省成都市易试验区成都市天府新区湖畔路北段366号1栋3楼1号
企业信息
注册资本:50---100万
注册时间: 2022-08-16




涂胶机器人离线编程_软件开发1114-弓创信息科技(成都)有限公司
- 产品名:机器人
- 产品价格:面议
- 尺寸:
- 产地:
- 公司:
2)Linear线性运动机器人工具姿态不变,机器人TCP沿座标轴线性移动!•机器人程序支持多个TCP,可以根据当前工作状态进行变换!•机器人工具被更换,重新定义TCP后,可以不更改程序,直接运行!定义工具坐标系的方法:N(N=4)点法/TCP法-机器人TCP通过N种不同姿态同某相碰,得出多组解,通过计算得出当前TCP与机器人手腕中心点(tool0)相应位置,座标系方向与tool0一致!TCPZ法-在N点法基础上,Z点与连线为座标系Z方向.
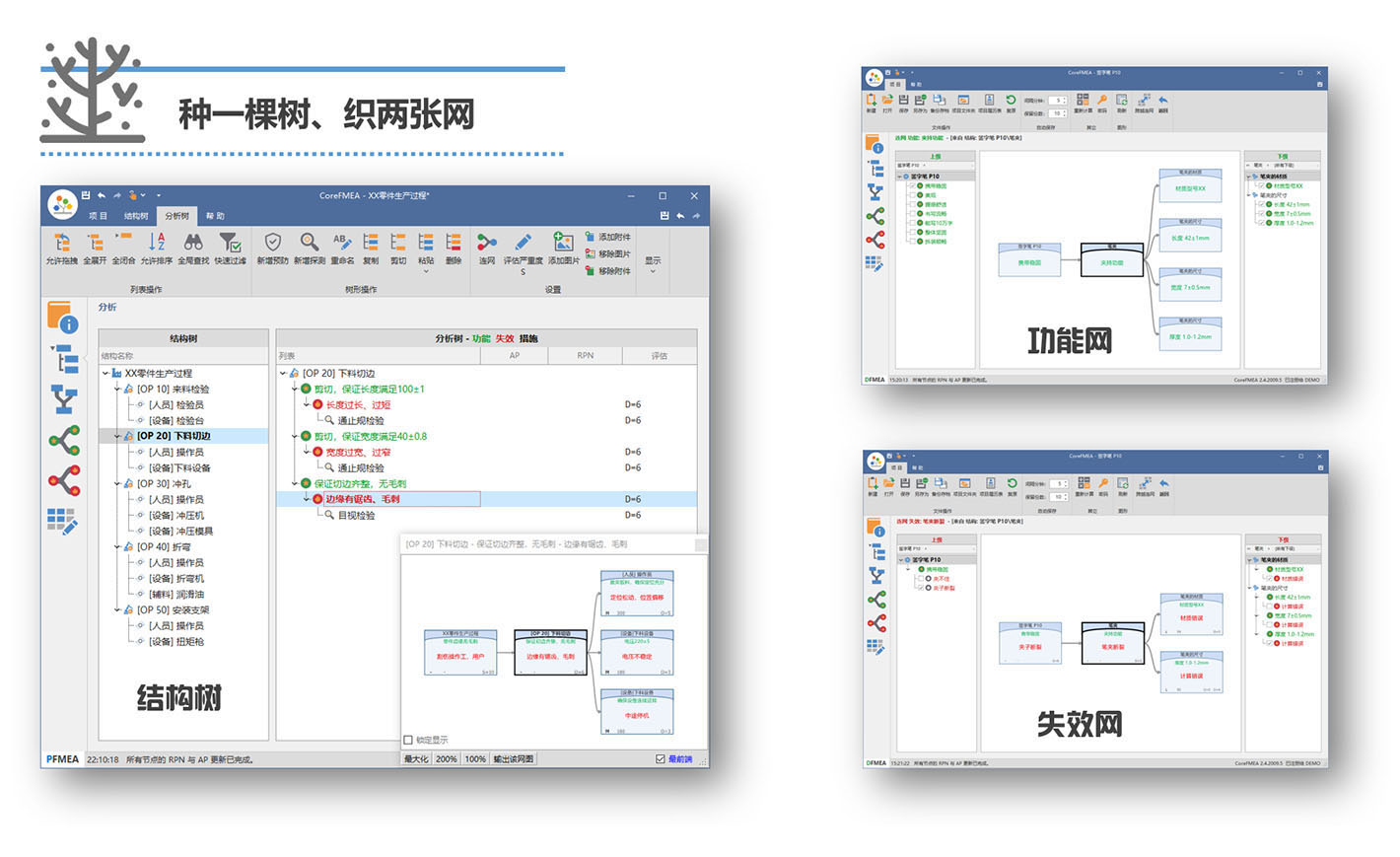
涂胶机器人离线编程
CaliRobot是什么?CaliRobot是一款易用的工业机器人工位标定软件.能够计算工具中心点TCP能够计算机器人基坐标系与工件坐标系的转换关系WhatisCaliRobot?CaliRobotisanACCURATEANDEASY-TO-USEapplicationforCellAlignment!+ToolCenterPoint+Transformationbetweenrobotbaseandpartcoordinatesystem------------------------------------------------------------------------为什么需要用CaliRobot进行机器人工位标定?为了提高工位内机器人的定位精度,从而获得更的作业和更高的质量输出。
CaliRobot有什么特点?和极小误差可快速的获得高质量结果无需预校准工具中心点对可疑数据自动报警支持报告格式自定义支持多种类型的机器人(ABB、KUKA、FANUC……)•机器人工件座标系是由工件原点与座标方位组成!•机器人程序支持多个Wobj,可以根据当前工作状态进行变换.•外部夹具被更换,重新定义Wobj后,可以不更改程序,直接运行!•通过重新定义Wobj,可以简便的完成一个程序适合多台机器人!
)CaliRobot是一款易用的工业机器人工位标定软件!◆能够计算工具中心点TCP◆能够计算机器人基坐标系与工件坐标系的转换关系应用领域:提高机器人焊接、涂胶的精准度;提高机械抓手对零件抓取的精准度;提高机器人测量工位的精准度;通过标定,将整个工位(夹具,焊枪摄像头抓手涂胶枪,机器人等元素)统一校准标定,提高整个工位的作业精度!为什么需要用CaliRobot进行机器人工位标定?为了提高工位内机器人的定位精度,从而获得更的作业和更高的质量输出。
WhatarethefeaturesofCaliRobot?HighaccuracyandminimalerrorFastandefficienttogethighqualityresultNoneedforcoordinateofthemeasuredtoolAutomaticalarmingforsuspectedinputdataSupportcustomizationforreportSupportdifferentkindsofrobot(ABB,KUKA,FANUC!

坐标系包含:基坐标系(BaseCoordinateSystem)大地坐标系(WorldCoordinateSystem)工具坐标系(ToolCoordinateSystem)工件坐标系(WorkObjectCoordinateSystem)工具坐标系•机器人工具座标系是由工具中心点TCP与座标方位组成.•机器人联动运行时,TCP是必需的!1)Reorient重定位运动(姿态运动)机器人TCP位置不变,机器人工具沿座标轴转动,改变姿态!
找涂胶机器人离线编程

弓创信息科技(成都)有限公司,具体产品品牌可上我司网站上查询!质量保证 价格取胜 信誉地址:四川省成都市易试验区成都市天府新区湖畔路北段366号1栋3楼1号 我们将尽全力为您提供优惠的价格及快捷细致的服务,希望能对您的工作有所帮助!更多产品详情请联系:总 18210591164。
医疗机器人技术是集医学、生物力学、机械学、机械力学、材料学、计算机图形学、计算机视觉、数学分析、机器人等诸多学科为一体的新型交叉研究领域,具有重要的研究价值,在军用和民用上有着广泛的应用前景,是目前机器人领域的一个研究热点。医疗机器人主要用于伤病员的手术、救援、转运和康复。
软件开发
公司地址:四川省成都市易试验区成都市天府新区湖畔路北段366号1栋3楼1号
企业信息
注册资本:50---100万
注册时间: 2022-08-16
 粤公网安备44030402000848号
粤公网安备44030402000848号